![]()


![]()
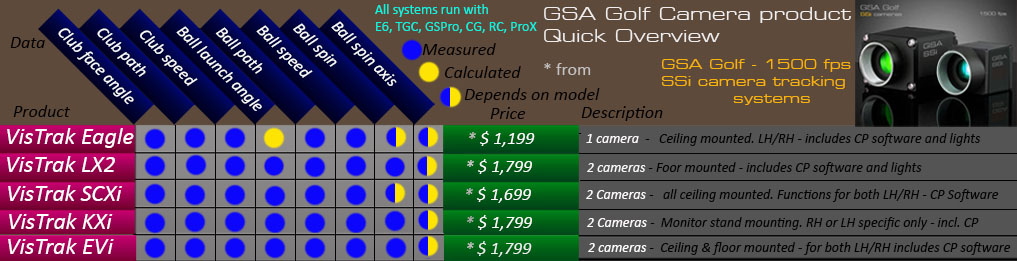
VisTrak Stereo 3D vision cameras
![]()
 -
-
Click above images to see the VisTrak systems
![]()

Today, this old ad from the 60's, would probably read
"If you can afford a motor scooter, you can afford a GSA golf simulator"

Hi! I'm Martin Paul Gardiner
Electronics and software development engineer and founder of GSA Golf
Regularly check out my tech news page for all our latest developments and free updates
if you have any questions
please feel free to contact me personally anytime via email
![]()
Technical Support



Email and remote access support is available for all original purchasers of GSA Golf systems.
For all non original purchasers (i.e. purchasers of used GSA Golf systems) remote access support can be purchased separately.
Click above images for more information.
![]()

![]()
 Home
Home Sensors
Sensors Cameras
Cameras Software
Software Enclosures
Enclosures GSA Courses
GSA Courses E6 Courses
E6 Courses Tech News
Tech News Golf Simulators
Golf Simulators