![]()
 Home
Home Products
Products
 Cameras
Launch Monitors
Cameras
Launch Monitors Software
Software Enclosures
Enclosures
 Golf Simulators
Golf Simulators
 Tech NewsInstallation
Tech NewsInstallation View Cart
View CartGSA Golf Advanced Golf Simulators
![]()

Hi-end golf simulators without the hi-end price
![]()

![]()
PROTEE VX

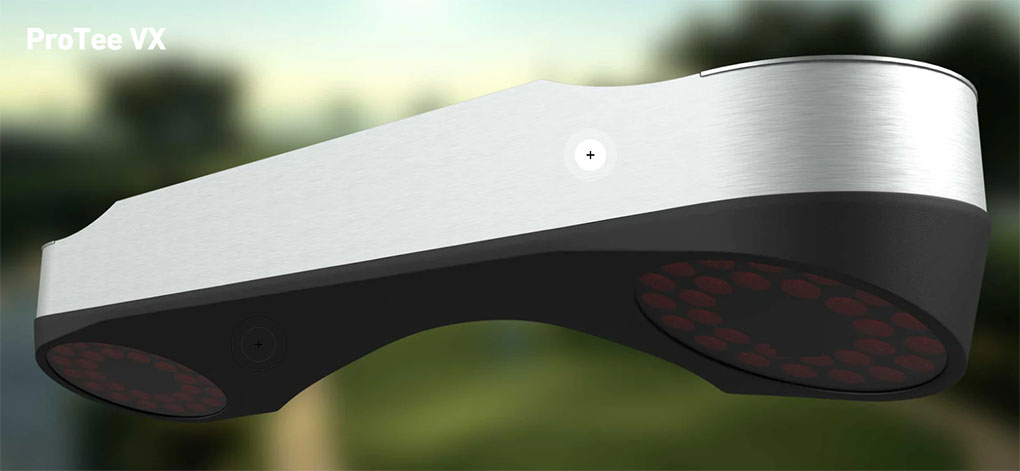
This ceiling mounted, camera based system accurately measures club and ball data
without the need for specialty balls or marked clubs !
Currently the world's most advanced hi-speed tracking system
$6,499
Click above image to read more...
![]()
NVISAGE

New NVISAGE launch monitor
Click above to read more...
![]()


Launch Monitors
Golf Simulator Camera Tracking systems


SCX systems from $1,699
Click above to read more about the SCX ...
GSA Golf develop and manufacture the world's most affordable, yet most advanced and comprehensive
hi-speed camera golf simulator tracking systems and golf launch monitors on the market today
Super low prices!
GSA Golf offer unheard of low pricing for advanced level hi-speed camera tracking systems.
No one else even comes close
![]()


Click above images to read more...
![]()


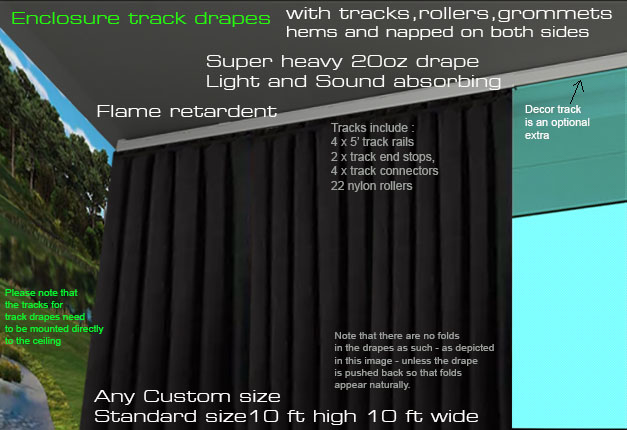
Golf Simulator Drape enclosures from $ 2,999.00
(click above to read more...)
![]()

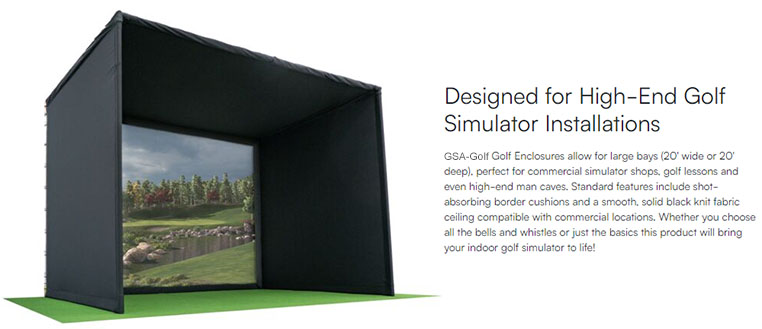
Golf Golf Pro enclosures from $ 2,999.00
(click above to read more...)
![]()
Carls Pro enclosures from $ 3,095.00
(click above to read more...)
![]()
New GSA Golf enclosure parts selection

Click above image to read more...
![]()
GSA Golf curved screens and enclosures

(click above to read more...)
![]()
GSA Golf panel enclosures

Golf Simulator Panel enclosures from $ 2,798
(click above to read more...)
![]()

Golf Simulator Drapes
from $ 349
9ft 10 High X 10ft wide
(click above to read more...)
![]()
GSA Golf enclosures are suitable for all other Golf Simulator systems
and launch monitors on the market today
 -
- -
- 
![]()

Golf Simulator screens from $185
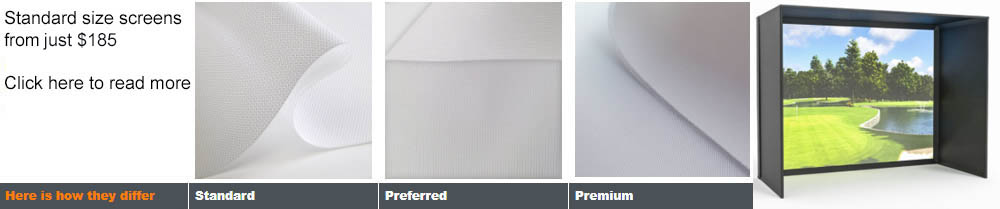
Click above image to read more
![]()

Golf Simulator Flooring


Click above image to read more
![]()
![]()
World's first and only golf simulator camera tracking software
for use with low cost commercially available hi-speed cameras

GSA Control Panel (CP) full version
$ 299.00
The GSA Golf camera tracking software (i.e. the Control Panel) can be purchased separately for those that are purchasing their own cameras.
1500 fps Cameras are available on Amazon for $280 each.
All additional products required to build your own high-speed (1500fps) golf simulator camera tracking system are available on Amazon.
Including cameras, cables and lights.
![]()

Hi! I'm Martin Paul Gardiner
Electronics and software development engineer and founder of GSA Golf
Check out all our advanced golf simulator products and product descriptions on this web site at leisure
and if you have any questions please feel free to contact me personally anytime at

Tel: 239 529 3060
![]()

![]()
Golf Simulator Game Software
All GSA Golf camera tracking systems interface with the following golf game software
Click above images to read more ...
Please note that if you already own any of the above software systems and it was licensed for a tracking system other than GSAgolf
then you will have to contact the respective software company to have your license converted to GSA Golf systems.
![]()

![]()


Click above to watch a selection of setup and intro videos
![]()

![]()
![]()
US Main Office
Naples, Florida
Office hours: M to F, 9am to 4pm US EST

![]()
Contact us
![]()
Please read our legal notice via the link below regarding warranty periods and return policy
---