![]()
![]()

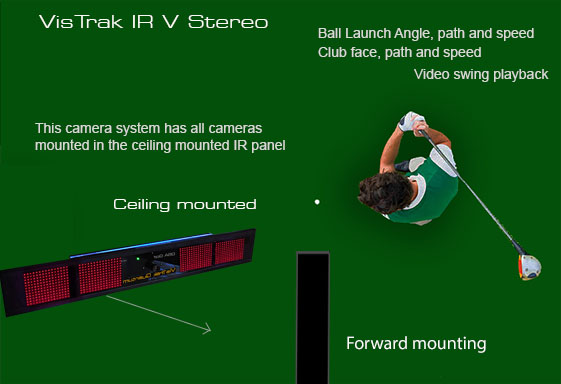
VisTrak IR V Stereo
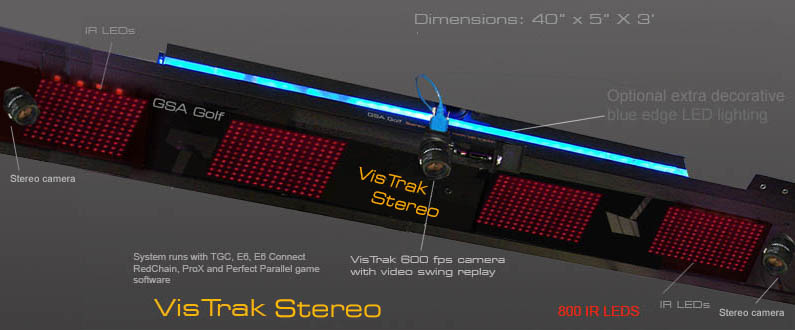
VisTrak Stereo - The VisTrak Stereo system combines the stereo cameras with the VIsTrak IR in the same case.
All cameras and lights are built into the ceiling mounted case.
The stereo cameras measure ball Launch angle.
The VisTrak camera measures ball speed, ball path, club face angle, club speed and path.
$ 2,999

When purchasing your own camera and lighting $ 299

![]()

VisTrak Stereo Bar
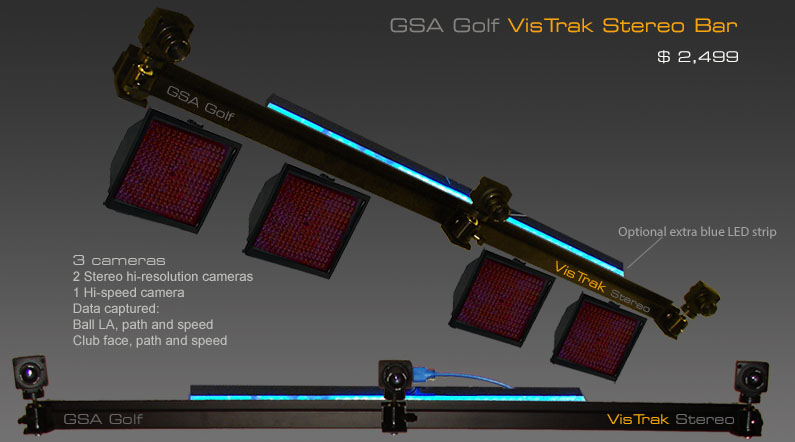
The VisTrak IR V Stereo and the VisTrak Stereo Bar have the same function.
Just the casing and price is different
Optional extra Stereo Bar projector mount $ 99
Instead of the standard 4 inch Stereo bar mounts, a projector mount can be added to extend the system down 1.5ft for those that have higher ceilings
![]()
VisTrak Stereo upgrade
to the VisTrak Eagle



If you already have a VisTrak camera, then you can add the stereo cameras to it.
Stereo camera spacing is 40 to 42 inches.
$ 1,499.00
When purchasing your own camera and lighting $ 299
![]()

![]()
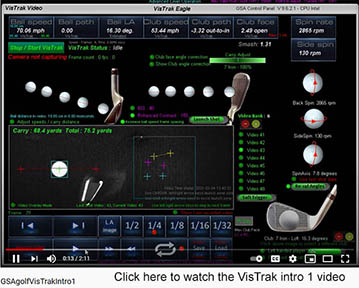
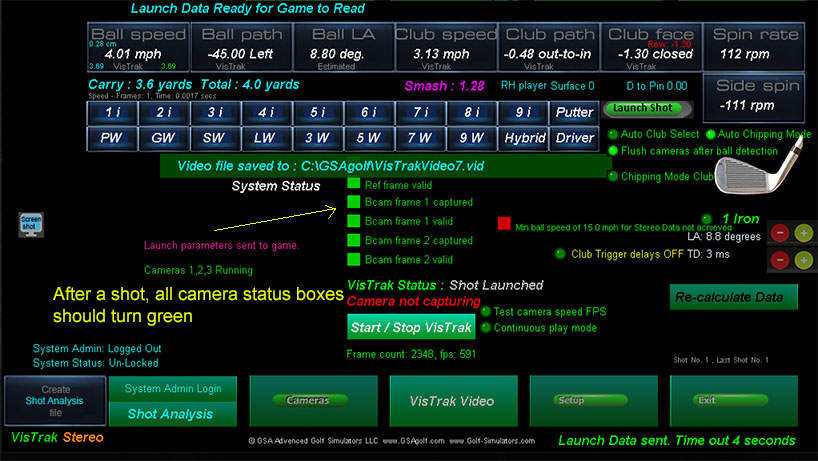
Video swing playback after every shot

You have the option to view the swing playback in the VisTrak video playback window.
You can also check each frame - one by one - in the cameras window.
![]()
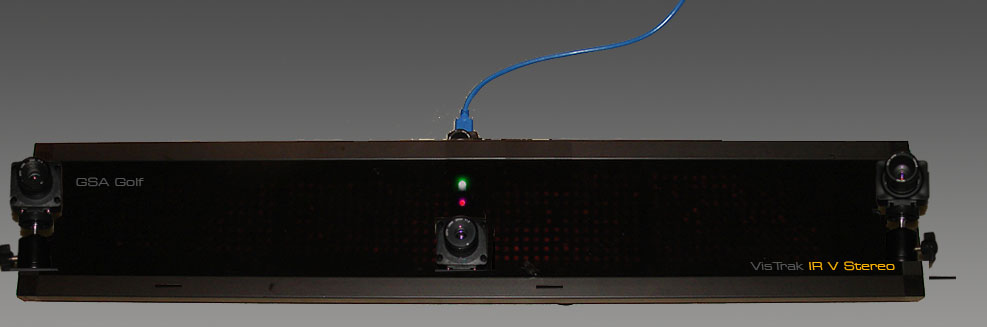
VisTrak IR V Stereo / Stereo Bar
Installation
Camera wiring
-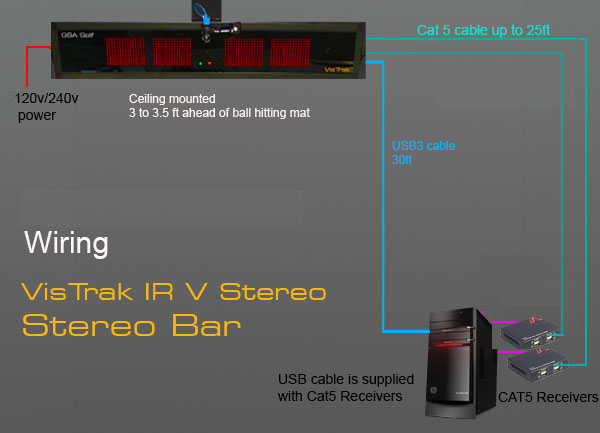
There are 3 cameras in the VisTrak IR Stereo and the Stereo Bar systems.
1 USB3 VisTrak camera - high speed camera
2 Hi Res Stereo cameras with USB2 / Cat5 camera cabling - camera


The VisTrak USB3 camera is connected to the the PC via the supplied USB3 cables

The Stereo USB2 / Cat5 cameras are connected to the PC via the supplied Cat 5 cables and the Cat5 transmitter adapters
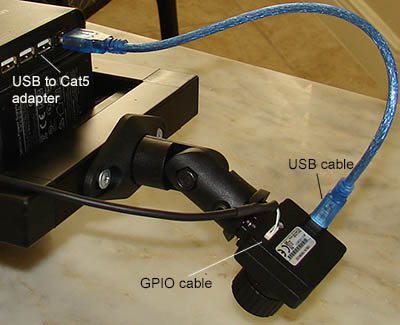


2 cables are connected to each camera.
A USB cable and a GPIO cable.
A short USB 2 cable is used to connect the 2 outer stereo cameras to the IOGEAR USB/Cat adapters.
The center camera is connected to the PC directly with the supplied blue long USB3 cable
Small GPIO cables are additionally connected to each camera.

![]()

![]()
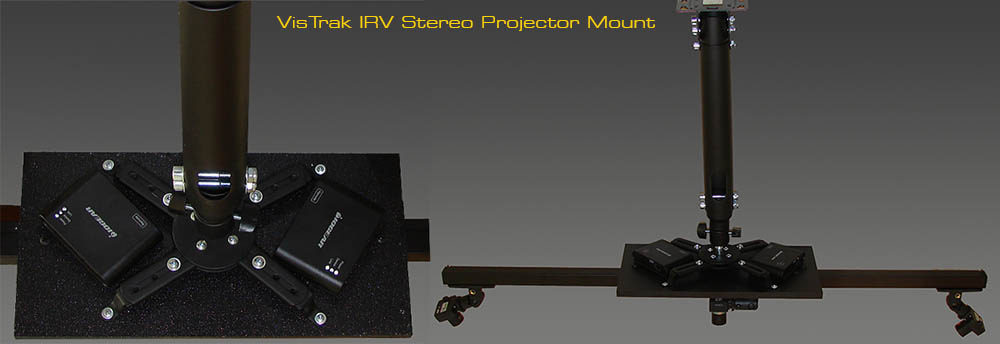
VisTrak IR Stereo Mounting
-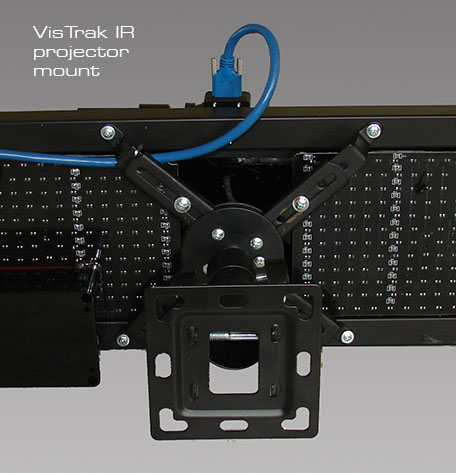
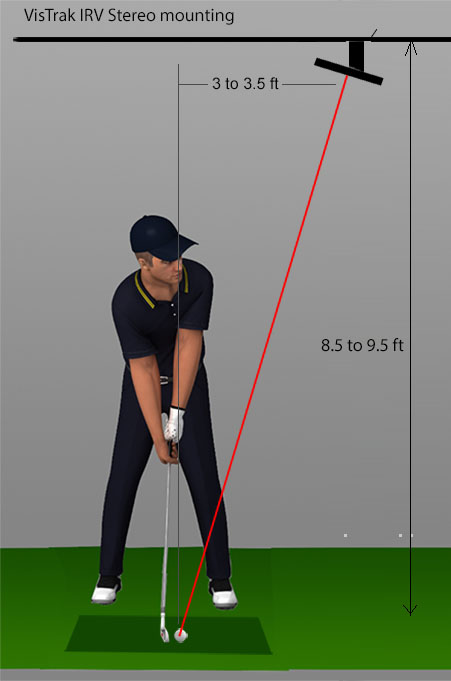
Use the ball swivel joint on the Projector mount to angle the VisTrak IR V Stereo directly
at the place where you will be playing the ball from.
![]()
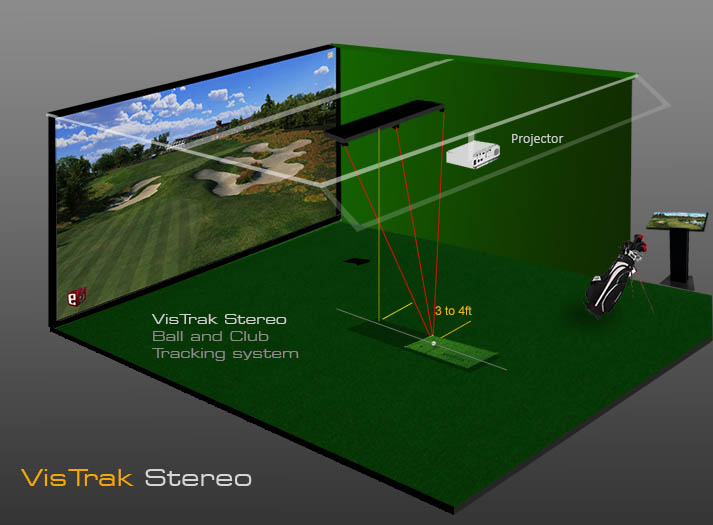
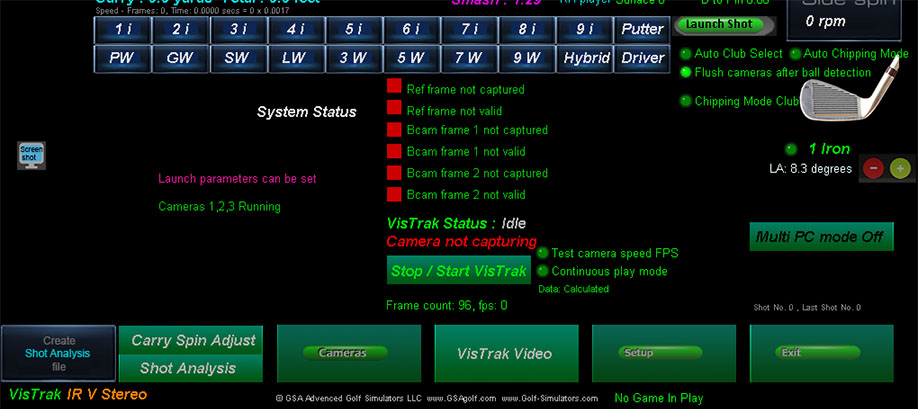
VisTrack IR V Stereo system setup
VisTrack IR V Stereo Video
![]()
VisTrak Installation and Setup Videos
 -
-
![]()
Please note:
If you are new to GSA Golf systems, it is recommended to first setup your IRV V Stereo system in two stages:
1. Just as a VisTrak Eagle so that basic play is possible
2. after you have the VisTrak Eagle up and running and you are able to play a round or 2 of simulated golf in VisTrak Eagle mode,
then add the stereo cameras to the system

VisTrak Eagle Setup
Click on the above link to see how to setup the VisTrak Eagle camera.
IR V Stereo Setup
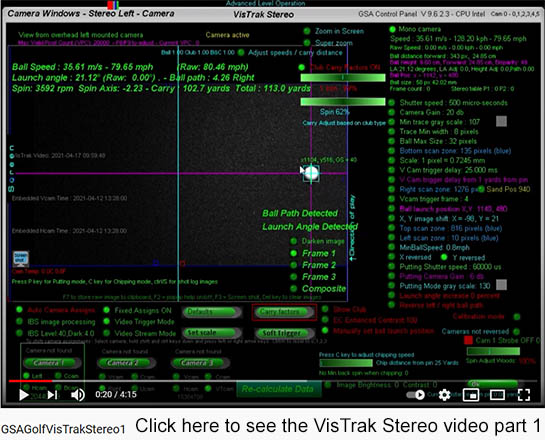
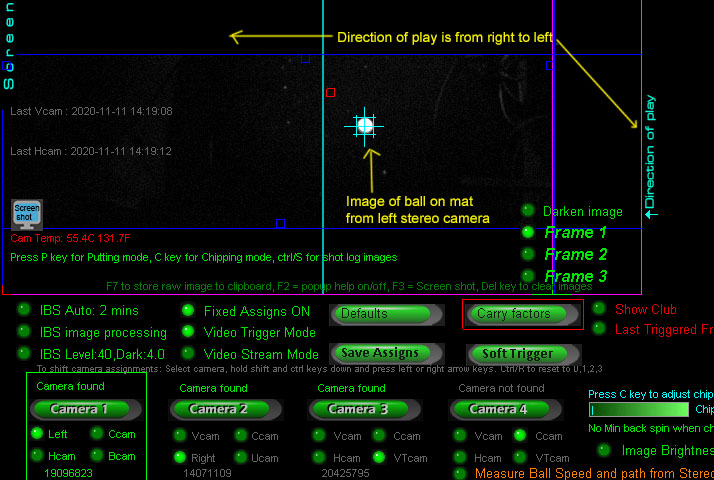
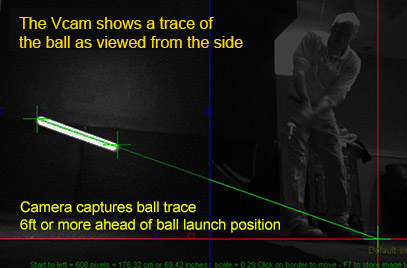
Non reflective flooring
Note that non-relective flooring is required for the stereo cameras to function
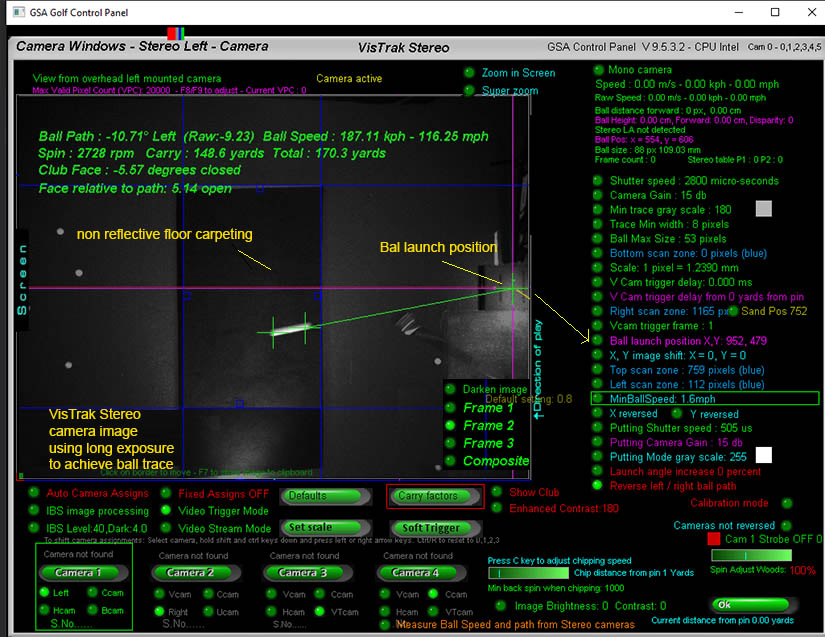
The above image shows a ball trace being well detected from the stereo cameras with the use of non-reflective flooring.
It is essential that the flooring is non-reflective!
And that there are no reflective objects in the valid field view of the cameras.
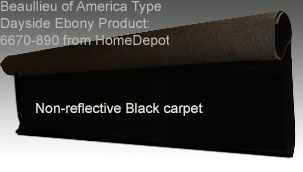
A recommended carpet is : Beaullieu of America - Type: Dayside Ebony, Product 6670-890 which is available at your local Home Depot store at around $4.00 a ft 6ft wide.
This carpet is also very good for lining the inside of your enclosure. Especially for the wall opposite the vertical camera.
You do not have to carpet the complete enclosure: only the part in the valid field of view of the camera.
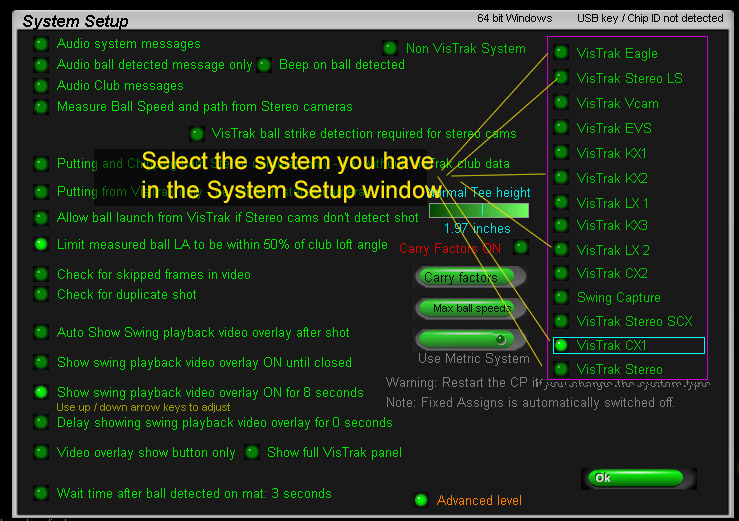
Select VisTrak Stereo in this case
![]()
Principle of operation
The VisTrak IR V Stereo consists of 3 cameras: The VisTrak Eagle camera and 2 Stereo cameras
The stereo cameras measure ball vertical launch angle
and the VisTrak Eagle camera measures ball speed, and path plus club face angle, speed and path.
The stereo cameras capture 3 frames.
Frame 1 is of the ball at launch position on the hitting mat (the reference frame)
Frames 2 and 3 are freeze frames of the bail in flight shortly after ball strike
In the VisTrak camera Control Panel (CP)
camera 1 is the stereo left camera,
camera 2 is the stereo right camera,
camera 3 is the VisTrak Eagle camera.
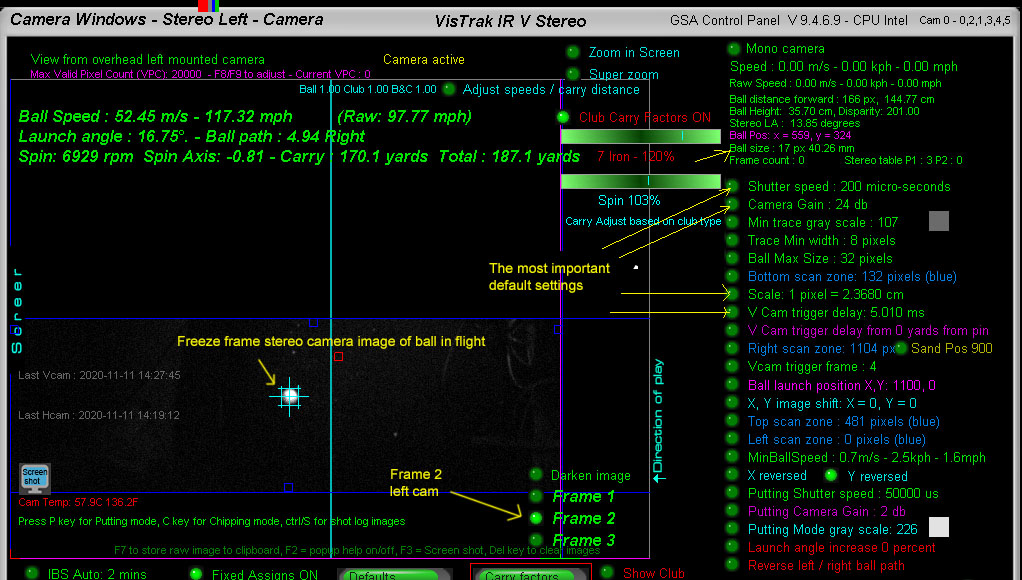
The above screen shots shows the most important settings.
Shutter Speed
In contrast to the regular VisTrak Stereo system that has a long camera exposure time to capture ball traces,
the IRV Stereo captures freeze frames of the ball in flight. Thus the shutter speed setting is set to a low 200 us.
Camera Gain
As the shutter speed is very fast, we set the camera's Gain to its max of 24 db
Scale
In order to measure the distance the ball has moved forward on the horizontal plane
from its launch position on the hitting mat and the position it is in when the camera captures it in flight,
we have to convert the distance measured in pixels in the image to real world distances.
To set the correct scale, an image of the ball is grabbed on the floor
and the scale is adjusted so that the ball size in pixels is converted to 42 mm.
The Ball Size is shown near top right in the panel.
Trigger delays
In order that the stereo cameras see the ball ahead of the ball striking position on the mat, a camera trigger delay has to be set.
In contrast to the regular VisTrak Stereo system that features a line scan trigger camera,
the stereo cameras in the IRV Stereo are triggered by the VisTrak camera itself.
As the VisTrak camera will send a trigger signal to the stereo cameras immediately after it detects a ball strike,
a trigger delay time has to be set on the stereo cameras in order to allow the ball some time to move forward and gain height.
Trigger delay options for VisTrak Stereo or Vcam systems
There are three methods of setting the camera trigger delays:
1. a camera fixed trigger delay setting for all shots and clubs
2. a club depedent trigger delay that changes the delay when a new club is selected or used
3. a variable ball speed dependant trigger delay
1. Stereo camera fixed trigger delays
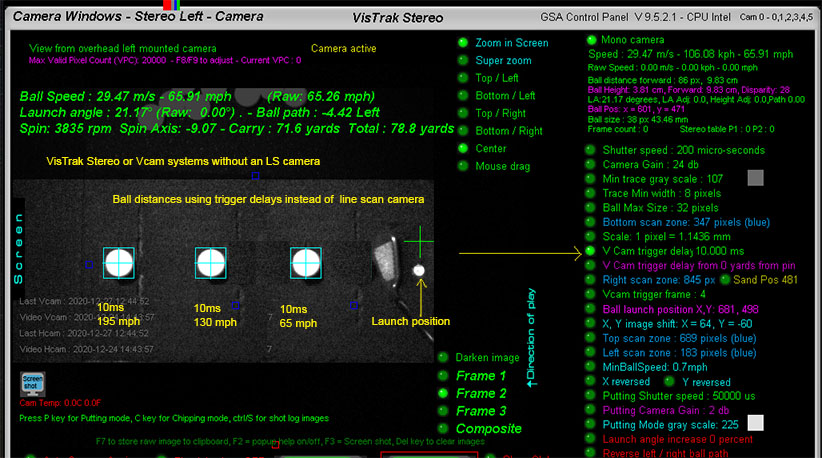
In the stereo camera windows of the CP, set the trigger delay for both cameras
You may have to experiment a bit to find the ideal trigger delay so that the ball in-flight is in the FOV of the cameras for all shot speeds.
A trigger delay of around 10 ms should be good though.
2. Club depedant trigger delays

You can switch the club dependent Vcam or Stereo camera trigger delays on or off from the CP's main window.
Note: this feature is as of CP version 9.5.2.2 Beta
If off, then the regular Vcam trigger delay - as displayed in the Vcam window - will be used.
3. Variable Ball speed Dependant trigger delays

Switch on the SpeedTrigger for Variable Trigger delays from the Setup window.
Adjust the "Capture Distance" with the up/down arrow keys when the mouse is over the "Use SpeedTrigger" button.
The capture distance is where the Vcam or Stereo cameras will be triggered from the ball strike position so that the captured ball images
- no matter what speed they are traveling - will always be close to this distance.
This 3rd method is now the recommended way of setting the trigger delays
Note: This feature is only available as of CP version 9.6.5.1 or higher
Camera aiming
Both stereo cameras and the VisTrak camera have to be aimed at a ball on the hitting mat
so that the image of the ball in both cameras line up with the center line of the image.
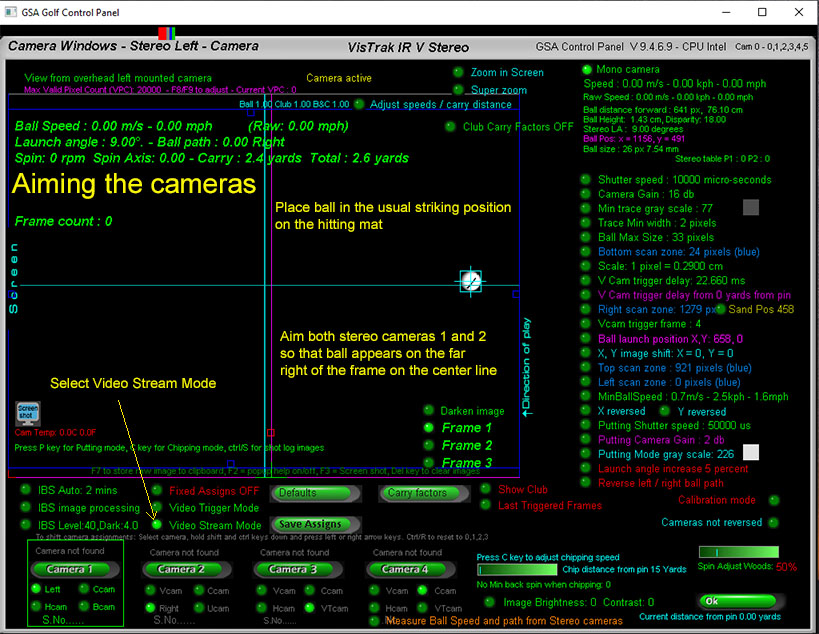
The stereo cameras should be aimed so that the ball on the mat appears at the far right of the frame on the center line.

The VisTrak camera (the center camera) should be aimed so that the ball on the mat appears around 2/3 rds of the way back.
VisTrak Stereo camera aiming

In order to simplify the stereo camera aiming, a 2 axis only mount is now being used
instead of the ball joint mount shown in the images on this page.
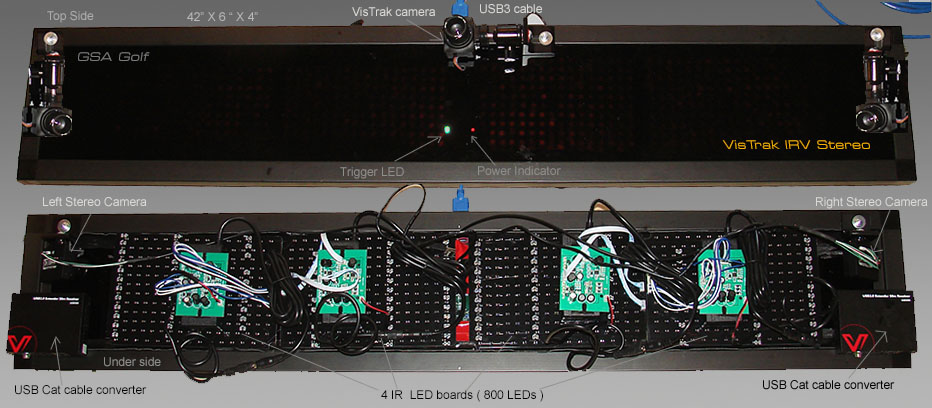
Camera orientation

For those that are assembling their own stereo system,
both the Left and Right cameras are mounted as shown above.
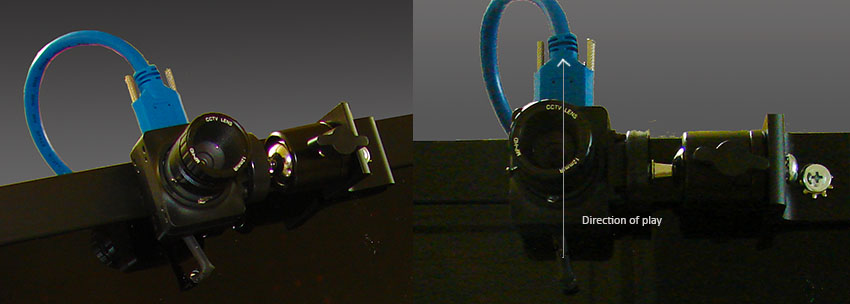
The blue USB3 cable on the VisTrak camera shows the direction of play.
If the unit is mounted sideways, then the camera orientaion is as shown above.

If mounted forwards, the VisTrak Camera is rotated 90 degrees.
Unit orientation

Currently, we're recommending a horizontal (sideways) orientation.
Forward mounting is also an option if preferred
![]()
Lenses
 -
-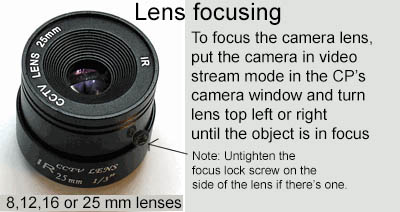
Current lens tests show:
12 mm lens : ball image size 32px - FOV distance forward range: 2ft 10"
8 mm lens: ball image size 22px - FOV distance forward range: 4ft 6"
Currently, systems are being shipped with 8 mm lenses on the stereo cameras and a 12mm lens on the VisTrak camera
![]()
Camera assignments
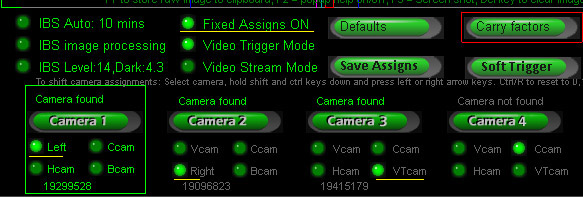
In the cameras panel, you should see the left camera as camera 1,
the right camera as camera 2,
and the VisTrak camera (VT cam) as camera 3.

If you see this error message flashing when first starting the CP,
then the camera assignments are incorrect.
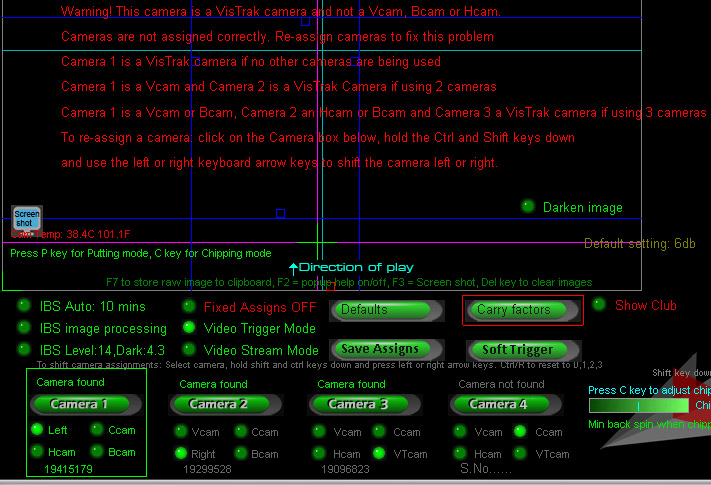
If you see a warning message like the above, the cameras have to be re-assigned as described in the error message.
Note: when re-assigning cameras, ensure that the "Fixed Assigns" option is OFF.
When the assingments are correct, switch the "Fixed Assigns" option back ON.
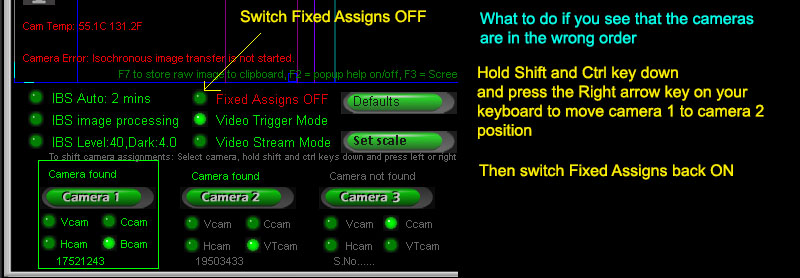
Follow the above instructions to re-assign the cameras to their correct positions.
Auto camera assignments
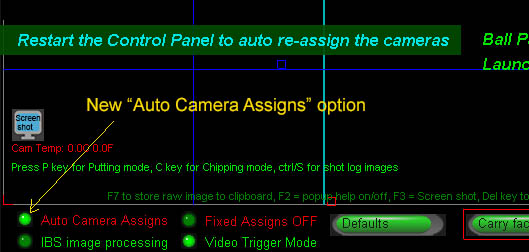
This new feature eliminates the need to manually assign the cameras
Simply switch on the Auto Camera Assigns option and restart the CP.
White Screen
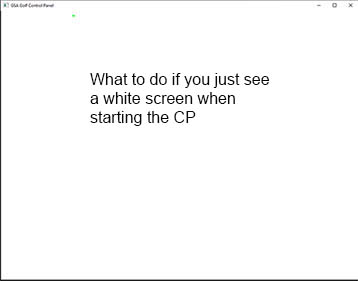
If the camera assignments aren't correct, then the CP may hang and just show a white screen when started.
To fix:
1. unplug all cameras from the PC.
2. restart the CP and switch the "Fixed Assigns" option OFF
and "Auto Camera Assigns" ON.
3. shut the CP down.
4. plug the cameras back into the PC and restart the CP.
5. Check that assignments are correct.
If it's a 2 camera system, then camera 1 is the Vcam camera and 2 is the VisTrak camera.
If it's a 3 camera system, then camera 1 is the Vcam camera, camera 2 the Hcam camera and 3 is the VisTrak camera.
If re-assigning cameras then the "Fixed Assigns" should be switched back ON again and the CP re-started
![]()
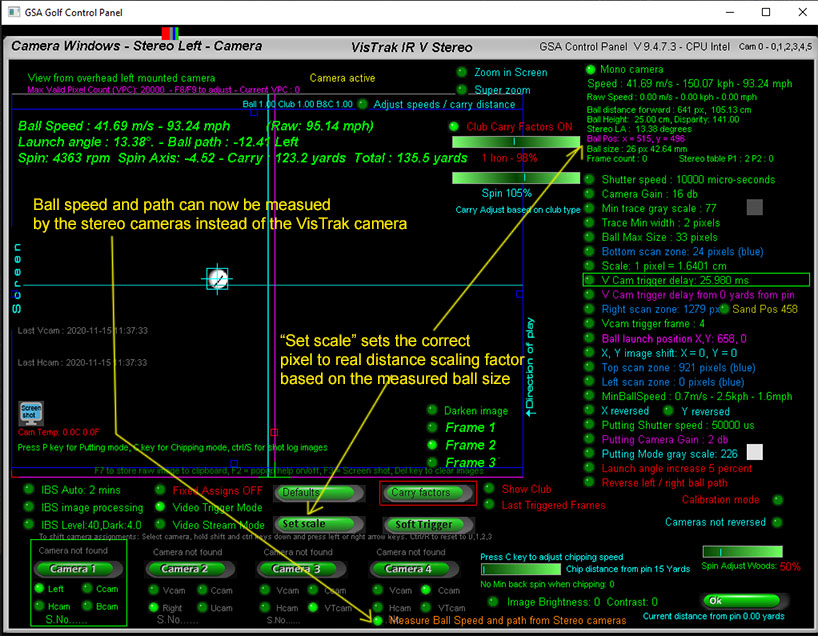
Measuring ball speed and path option with the VisTrak IRV Stereo
![]() - V 9.4.7.3 Beta
- V 9.4.7.3 Beta
As of this update, you can now opt to have the system measure ball speed and path as well as LA with the stereo cameras instead of from the VisTrak camera.
A new "Set scale" button automatically sets the correct scaling factor.
![]()
Hard and software triggers
The VisTrak IR V Stereo cameras are triggered by the CP and not via a line scan camera.
Important note:
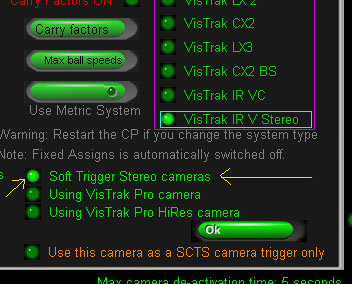
There are two methods of triggering the stereo cameras via the CP: Soft or Hard.
Although both methods are initiated by software commands to the cameras as soon as the CP detects a ball strike in the VisTrak camera,
the SDK SoftTrigger command takes longer to process than the Hardware trigger.
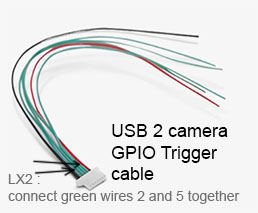
The Hardware trigger sets a GPIO output line that is connected to camera's trigger input line on the cameras high for a split second.
So, for this method to work, a GPIO cable connector that has its output and input lines shorted out, has to be connected to the cameras.
If you don't have this GPIO connector then you must ensure that the "Soft Trigger Stereo Cameras" option is ON.
Otherwise, the cameras won't get triggered and thus the stereo frames 2 and 3 won't be captured.
![]()
Camera Trigger delays for VisTrak Stereo
The Stereo cameras are triggered to capture 2 freeze frames from the VisTrak Eagle camera.
It is important to set the timing of this trigger signal so that the ball images are within the FOV of the Stereo cameras.
If the trigger signal is fired too soon then the ball images will be captured before the FOV of the camera and if fired too late
the ball images will be beyond the FOV of the Vcam B cameras.
Thusly, the trigger signal has to be delayed somewhat but not be delayed too much.
There are two methods of delaying the Vcam trigger signal from the VisTrak Eagle:
1. Setting the trigger frame beyond the frame strike frame of 16
2. Setting a trigger delay in the stereo camera windows.
Both have the same effect.
Until we come up with recommended delay and camera trigger frame setting,
some experimentation will be required to get the settings just right.
![]()
Setting Camera Trigger delays for each club
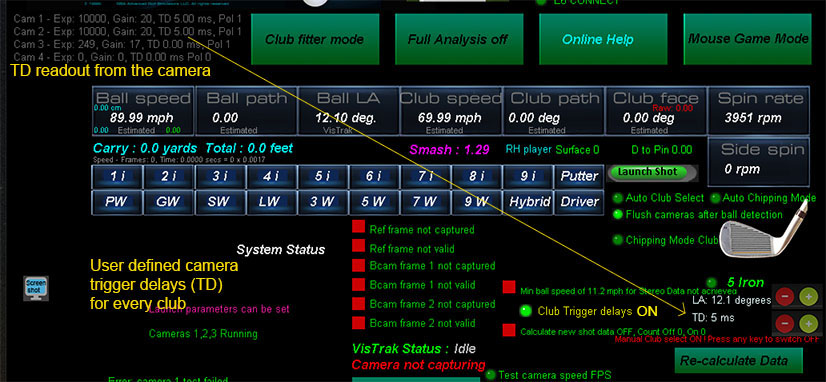
You can now set the camera trigger delays from the CP's main window separately for every club.
Trigger delays are required for both the VisTrak Stereo and VisTrak Vcam systems to allow the ball to come into the FOV
of the stereo or Vcam cameras after a ball strike.
If the trigger delay is too short, then the ball will be too near to the club for the cameras to detect it correctly.
Trigger delays can also be automatically set depending on how close the ball is to the pin during a game.
Note that Trigger delays are now default ON if using a VisTrak Stereo or Vcam system.
We'll have a set of default trigger delay values later.
![]()
The VisTrak IRV Stereo uses the regular VisTrak Eagle camera.
Click on the below link to see how to setup the VisTrak Eagle camera.
![]()
LA Image feature in the VisTrak window

When using VisTrak Stereo or VisTrak Vcam systems, it's often useful to be able to view the stereo or Vcam Launch Angle images
directly in the Video without having to switch over to the CP and go into the CP camera windows.
Click multiple times to step through the fames if using a stereo system with 2 or more frames.
This feature is also in the Video Overlay window .
![]()
Stereo calibration table
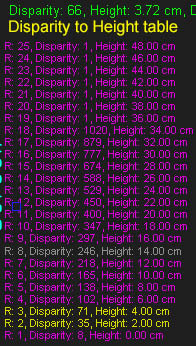
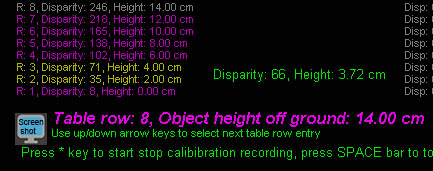
The stereo calibration table for the VisTrak V Stereo consists of just 2 values - Disparity and Height
The default IRV Stereo table has height increments of 2 cm instead of the usual 10 cm in the regular stereo systems.
As ball shot disparity values will rarely match a table entry exactly, 2 disparity values are used.
One that is greater or equal to the real disparity value and the other that is just less.
The above example shows a shot disparity value of 66 which lies in between the 2 table disparity values showed in yellow (35 and 71).
From the 2 height values associated with the disparity values (2 cm and 4 cm) , a weighted real height value of 3.72 cm is calculated.
Note that if both cameras are perfectly aimed at the same center line then disparity at the converging point at floor level will be zero.
This will probably prove to be difficult to achieve but at least the disparity number at floor level should be a low number.
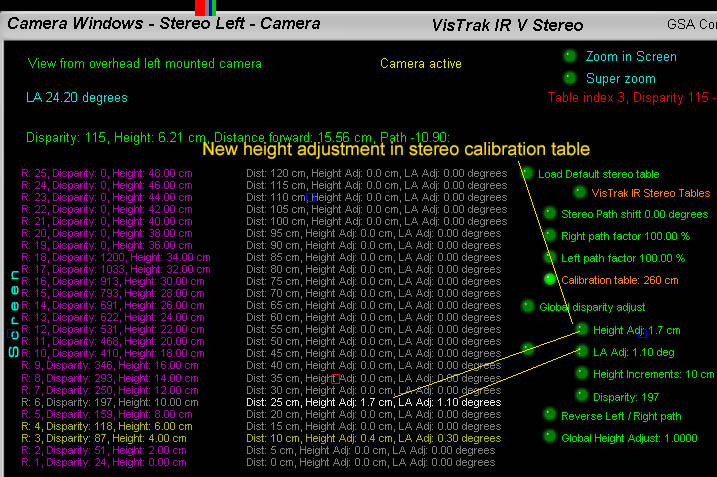
VisTrak Stereo IRV ball height adjustments based on ball distance from tee.
In addition to the calibration LA adjustments, there is now a ball height adjustment.
While both LA and Height adjustments will effect the LA, only the height adjustments will effect ball speed adjustments.
Note: the actual table values have yet to be determined by us. Updates later will include a set of default values.
 .
.
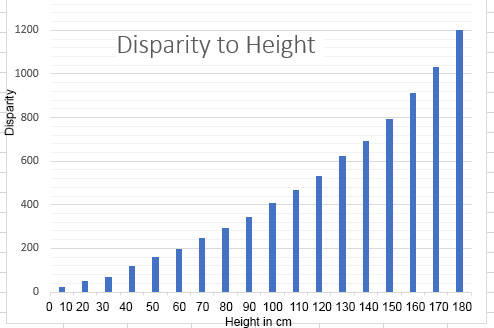
A graph plot of disparity to golf ball height shows a non-linear exponential curve.
Stereoscopic vision explained
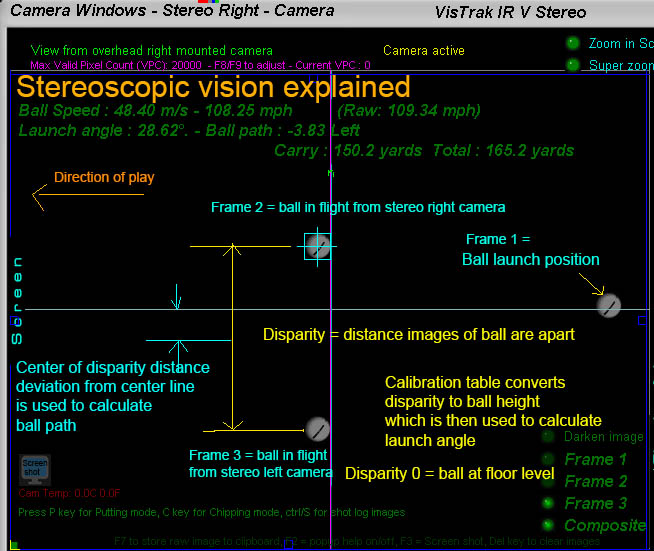
The above diagram explains the basic stereoscopic principles.
Note: the above diagram shows the stereo cameras for the VisTrak IRV Stereo
where the direction of play is from right to left and not from bottom to top as with the regular VisTrak Stereo system.
If the two 2 stereo cameras are aimed precisely at the center line and a ball is placed at floor level, the images of the will appear on top of each other.
The disparity of the ball is then zero (or near zero) and this is known as the "Converging point"
When the ball is elevated, the images of the ball in the camera frames will start to separate. The distance the ball images are apart is the "Disparity".
Using a "disparity to ball height" table and with weighted calculations, the exact height of the ball can be determined.
Knowing where the ball was before ball strike (frame 1) and the trigger delay time on the stereo cameras, the ball LA, speed and path can be determined.
Ball path is simply derived from the divergence the center of the disparity distance is from the center line.
i.e. a perfectly straight shot would show that the 2 ball images are the exact same distance from the center line.
![]()
Full New Calibration method

To edit the calibration table, click the "Calibration Mode" option in one of the two stereo camera windows
Calibration procedure
Should re-calibration be required then the following calibration procedure should be made:
Calibration setup
In order to calibrate, we need to raise a golf ball from the floor up to around 170cm in 10cm steps on the center line.
You can use any method you like to raise the ball off the ground in the 10cm steps.
i.e. You could also use an extendable camera tripod, an number of books and boxes stacked on top of each other etc
Ensure that only the ball is detected in both cameras and not part of the construction to raise the ball.
Cover the construction in a dark (black) drape if the issues exist.
.17 Calibration steps
Note that the calibration table consists of 17 row entries at set 10cm distances from 0 cm to 170 cm.
i.e. 0, 10, 20 ... to 170 cm
To help assist the calibration process, a couple of new features:
1. Pressing the SPACE bar on the keyboard switches the calibration mode on and off so that the images captured can be inspected before entering the values
2. The active row is now bright white
3. A beep and message is shown after the "Ins" key has been pressed showing that the values have been entered into the calibration table
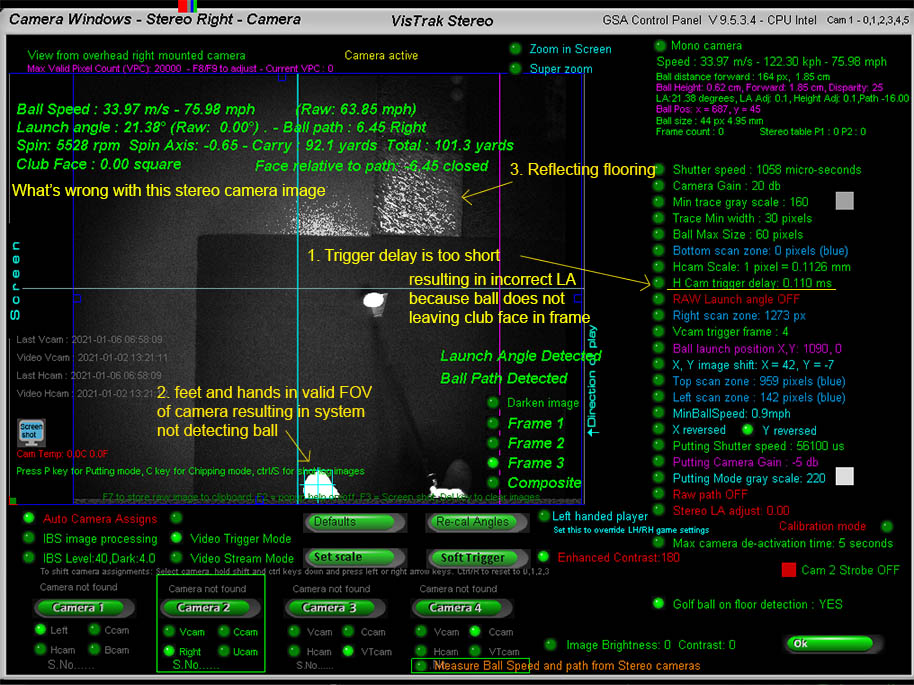
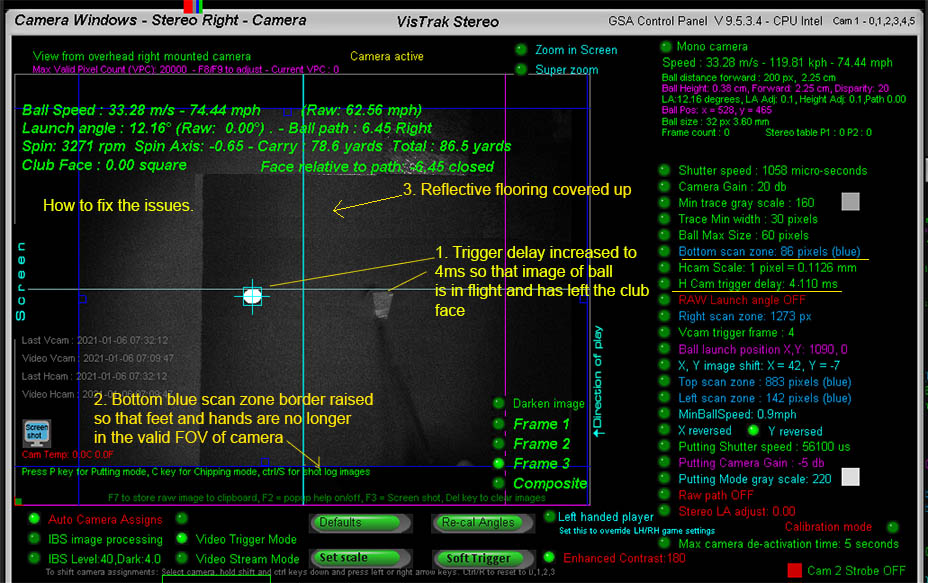
Common user issues and solutions
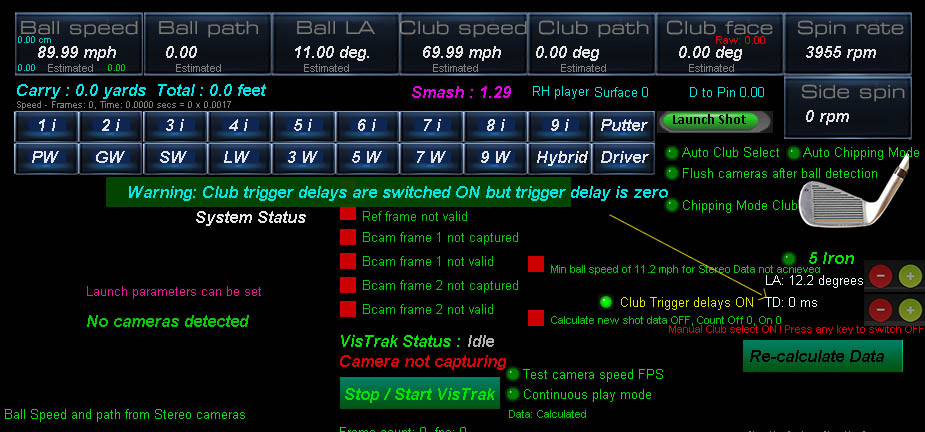
Issue 1: Customer had switched on the Club Trigger Delays but the settings are all zero.
This means there is zero stereo camera trigger delay and so the ball images in the stereo cameras will not be captured in flight.
i.e. they appear next to the club at floor level and thus no Launch Angle can be measured.
Trigger delays should be around 3 to 8 ms.
A warning message is now shown if the trigger delays are not set.
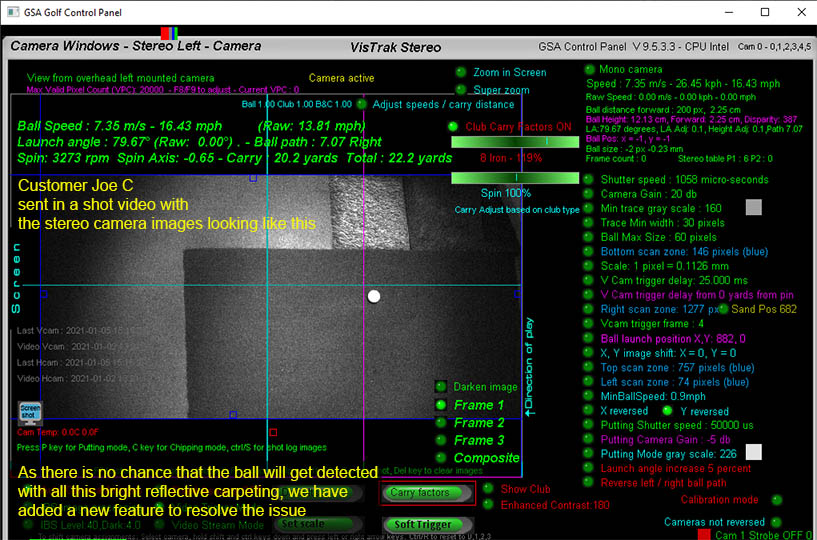
Issue 2: Customer has reflective flooring so the ball won't be detected.

A new "Enhanced Contrast" feature for stereo cameras resolves the issue nicely
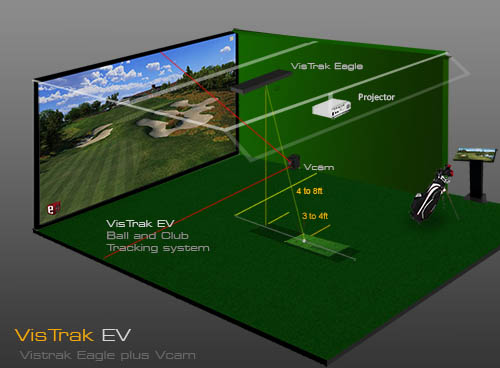
How to convert a VisTrak Stereo system
to a VisTrak EV
( Eagle + Vcam)
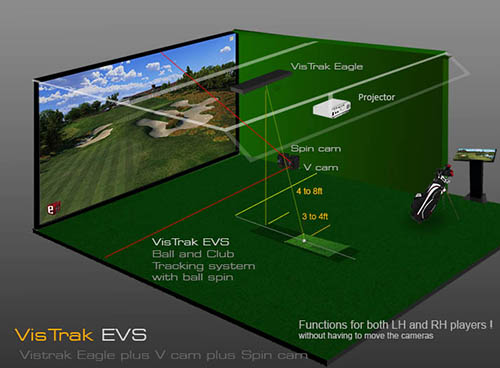
or VisTrak EVS
( Eagle + Vcam + Spin cam) .
The VisTrak Stereo consists of a hi-speed VisTrak camera and 2 stereo cameras.
The 2 stereo cameras are the same cameras used in the Vcam and Spin camera systems
so you can also setup these 2 cameras to function as a side mounted Vcam vertical launch camera
and a ball spin detection camera if you wish.


If you already have a VisTrak Stereo or VisTrak VcamC system
and would like to try out your system using a VisTrak EV or EVS system,
then this is quite an easy conversion.
Step 1.
Order the Vcam conversion Kit from us - it's free for all VisTrak Stereo and VisTrak VcamC users.
The conversion kit contains a base, camera mount and new 3mm wide FOV lens
Step 2.
Disconnect the cables connected to either one of the stereo cameras (if converting from a stereo system)
or the VcamC camera (if converting from a VisTrak Vcam C system)
Step 3.
Unscrew the camera and mount it onto the VisTrak Vcam mount on the Vcam base.
Step 4.
Connect a USB 2 cable from the camera to the PC.
Step 5.
Switch to "VisTrak Vcam" mode in the control panel's Setup Window and re-start the CP
Step 6.

Follow the Vcam installation and setup instructions on the above link

Follow the Spin cam installation and setup instructions on the above link
![]()
Technical Support



Email and remote access support is available for all original purchasers of GSA Golf systems.
For all non original purchasers (i.e. purchasers of used GSA Golf systems) remote access support can be purchased separately.
Click above images for more information.
![]()

![]()


 Home
Home Sensors
Sensors Cameras
Cameras Software
Software Enclosures
Enclosures GSA Courses
GSA Courses E6 Courses
E6 Courses Business
Business Tech News
Tech News